I my cybernetic zoo post of a couple of days ago I was talking about the cybernetic dog made by Philips in 1928, called ‘Philidog’. It is amazingly hard to find more information about it, but I found an article in a french science magazine called ‘Atomes’, numéro 137 from october 1957. A great magazine itself, from the time that both atomic energy and cybernetics were still cool and making nerdy hearts tick faster… Makes one wonder how we will look at artificial life in fifty years time…
so finally here’s some more on Philidog (1928), and even a (pretty unclear) picture:
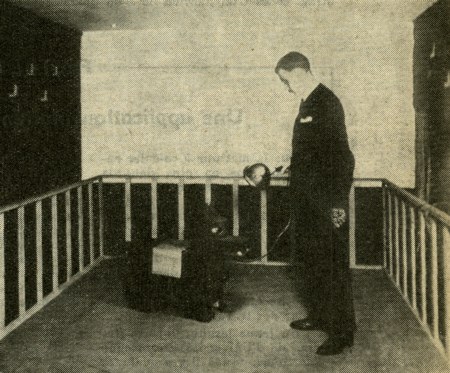
and the accompanying little article reads as follows:
“Philidog – le premier animal électronique
1928… Le mot ‘cybernétique’ n’avait pas encore eu le regain d’actualité qu’il connait aujourd’hui. Par contre, l’électronique avait déjà dépassé le stade des balutiements, et certaines de ses réalisations sortaient du cadre habituel.
Il y a ving-neuf ans, Philips présentait aux techniciens puis au public l’ancêtre des animaux électroniques, le chien électrique Philidog.
Les yeux de cet ‘animal’ étaient constitués pas des cellules photoélectriques, suivies de tubes amplificateurs et de relais en cascade, lesquels commandaient la mise en service de moteurs électriques. Deux systèmes semblables étaient donc prévus, les sources d’alimentation étant logées dans le corps du chien.
Les moteurs entraînaient par chaîne deux roues motrices à l’avant, une roue folle unique étant à l’arrière. Le comportement du chien était le suivant. Lorsque l’opérateur dirigeait la lumière d’un projecteur sur l’oeil droit, le moteur correspondant se mettait en route et le chien se dirigeait vers la lumière. Il était de même pour l’oeil gauche. En éclairant les deux yeux, le chien avançait en ligne droite. Il s’arrêtait cependant à cinquante centimètres du projecteur, car des relais réglés à saturation coupaient le courant des moteurs; toutefois, ces derniers subissaient encore une certaine sollicitation, de sorte que l’animal sautillait sur place. En même temps, d’autres relais mettaient en route un volant isolant recouvert du laiton sur la moitié de sa périphérie; un contact sur cette lamelle mettait alors un klakson en service, de sorte que les assistants avaient l’illusion (un peu factice !) que le chien, blessé par la lumiére trop vive, se cabrait et aboyait.
Deux ou trois ans plus tard, le chien fut équipé de cellules et de tubes beaucoup plus sensibles, de sorte que ses mouvements pouvaient être commandés par une simple lampe de poche.
Des centaines de démonstrations en furent faites, et nous pouvons regretter sa disparition dans la tourmente de l’occupation, car nous pensons que sa place aurait été dans un musée technique.
Depuis, les tortues de Grey Walter et, plus près de nous, les renards de Ducrocq, ont montré de nouvelles voies dans les réalisations d’animaux électroniques, mais nous avons pensé qu’il n’était peut-être pas inutile de rappeler l’existence de celui qui fut leur premier ancêtre, le chien Philidog. ”
In my (quick and dirty) translation:
“Philidog – the first electronic animal
1928… The word ‘cybernetics’ had not yet had the upsurge in actuality it knows today. Nevertheless, electronics had already passed the stage of infancy, and some of its realizations were already well beyond the usual.
Twenty-nine years ago, Philips was presenting the ancestor of the electronic animals, the electrical dog Philidog, first to technicians and later to the general public.
The eyes of this ‘animal’ consisted of photo-electric cells, followed by amplifying tubes and stepping switches which were controlling the electrical motors. Two similar systems were thus provided for and the power source was located in the body of the dog.
The motors were linked via a chain to two driving wheels at the front, with a free running wheel at the back. The behaviour of the dog was as follows; In case the operator was pointing a spotlight at the right eye, the corresponding motor would start, and the dog would move towards the light. The same would go for the left eye. By lighting both eyes, the dog would go forward in a straight line, yet it would stop at fifty centimeters from the spotlight, because the relays which were so calibrated would cut the current of the motors; these would still undergo a certain sollicitation, so that the animal would jump about on the spot. At the same time, other relays would start up an isolating wheel covered with brass on half its circumference; a contact on this thin layer would power a sounding horn, so that those present would have the illusion (a bit fake !) that the dog was rearing itself and barking, hurt by a light too powerful.
Two or three years later, the dog was fitted with much more sensitive cells and tubes, so that its movements could be controlled by a simple torchlight.
Hundreds of demonstrations of it were made and we regret its disappearance in the torment of the occupation, because we think its proper place would have been in a technical museum.
Since then, the tortoises of Grey Walter and, closer to us, Albert Ducrocq, have shown new ways in the realization of electronic animals, but we thought it would not be useless to remind ourselves of the existence of their first ancestor, the dog Philidog.”
Also I found this book: Albert Ducrocq, “L’ère des Robots”, Julliard, Paris, 1953:
This book seems very odd indeed: a very optimistic view of technological progress (note the atom symbol on top of the innards of Electronic Fox nr. 5) and a pretty complete disregard for the past; on the flap it says: “Apart from some amazing precursors, man appeared on earth only in the 18th century: before the planet was populated with children…”
Wow.
He writes about many things, perception of colours as a superfluous luxury, about the periodic table of elements as a memory system and about the universe as a universal machine. At the end of the book our Albert seems to propose a universal language system in the tradition of Wilkins and Leibniz (apparently without being aware of their efforts in the seventeenth century), and appropriately based on binary numbers, effectively a classification of all notions, neatly numbering them in the right order. And after this a whole discussion of artificial art. Pretty amazing scope.
In the book also a picture of Albert Ducrocq and his robot ‘Miso 1’ (1950):
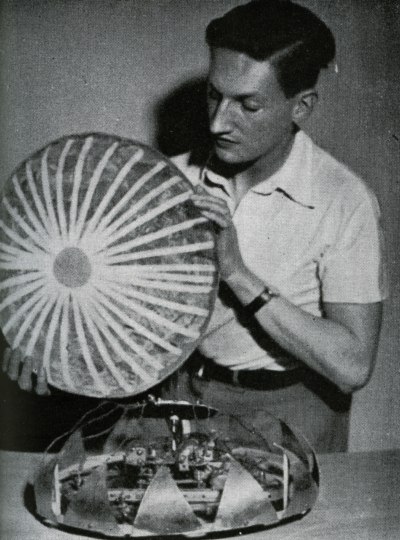
the caption reads:
“Miso 1, animal électronique se caractérisant par une symétrie parfaite. Douze papilles périphériques lui permettent de flairer simultanément les corps avoisinants dans toutes les directions, tandis que les quatre roues peuvent pivoter sur elles-mêmes. Mais un système de chaînes leur assure toujours des directions parallèles.”
in english:
“Miso 1, an electronic animal characterized by a perfect symmetry. Twelve ‘buds’ on its circumference allow it to simultaneously sense bodies approaching from all directions, while the four wheels can turn freely on themselves. But a system of chains assures that their directions are always parallel.”
Putting this together with the information from the book of de Latil, I suppose that this robot was a kind of dome on wheels, with twelve sensors which could sense proximity by using capacitance (the principle of the Theremin). The mechanism of the wheels was probably way to distill one direction out of the twelve inputs. Seems very interesting and original, a bit similar to sea urchins.
The control mechanisms used in these vehicles (and in the ones in my previous post) are very well explained in this classic little gem of a book: “Vehicles” by Valentino Braitenberg.
I finally found the time to read it from end to end, and I can only recommend it very highly !
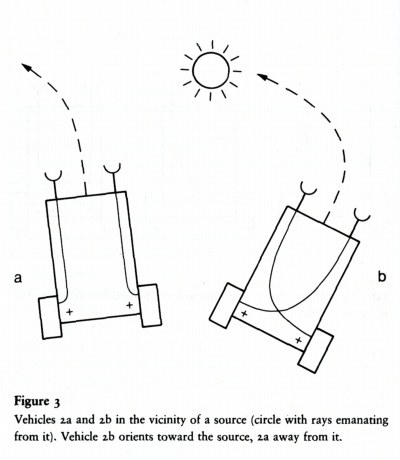
Below one example for the very beginning of the book: vehicle 2, “Fear and Agression”, which works along the lines of most of the ancestral vehicles shown earlier.